
Как сделать антирадар своими руками
Опубликовано: 04.05.2024

Предназначение

Антирадары могут быть 2 типов;, их устройство и принцип работы в основном зависят от детектора, который может производить глушение сигнала в радио- или лазерном диапазоне. При этом следует учитывать, что лазерные антирадары не могут подавить радиосигналы.
Принцип работы
Активный радар работает по принципу агрессивного воздействия на источник сигнала. Такие приборы во многих странах запрещены законом. Принцип работы заключается в том, что детектор улавливает сигнал радара, мгновенно обрабатывает и отправляет обратно. Мощность сигнала такова, что данные о скорости передвижения транспортного средства теряются, соответственно, определить ее становится невозможно.

Отсюда вывод: чем больше датчиков у радара, тем выше вероятность подавить сигнал прибора дорожной полиции. Такой же принцип работы и у радара, работающего на радиочастотах, которые глушат сигналы полицейских радаров.
Какую модель выбрать
Антирадары и глушилка камер ГИБДД популярных производителей, находящиеся на российском рынке автомобильных аксессуаров, по функциональным возможностям и стоимости можно условно разделить на следующие категории: бюджетные, средний ценовой сегмент и премиум.
При выборе радара необходимо учитывать параметры прибора, которые будут наиболее востребованы водителем:
- Защита от помех и количество ложных срабатываний.
- Уровень надежности.
- Точность фиксируемых сигналов.
- Скорость.
- Дальность приема сигналов.
- Большой функционал.
При выборе радара бюджетной категории ориентируются не столько на функциональность прибора, сколько на его стоимость, которая в этом случае является основным фактором:
- ParkCity RD-11. Прибор, лидирующий в этой категории. Работа в узком диапазоне частот. Ненадежная защита от помех.
- Prestige RD-101. Хорошая фиксация сигналов, голосовое оповещение при низком качестве работы дисплея.
- Silver Stone F1 Fuji. Хорошая фиксация сигнала. Работает как в режиме радар-детектор, так и антирадар активный. Плохой уровень регулировки громкости с учетом расстояния.
Антирадары средней ценовой категории выбирают с учетом соотношения цены/качества и функционала:
- Sho Me G-1000 Signature. Современный прибор с лазерным приемником. Надежная работа и защита от ложных срабатываний.
- Playme QVICK 2. Устройство произведено с применением технологии anti-CAS. Надежное, с хорошей защитой от помех.
- Inspector RD GTS. Сигнатурный прибор с GPS и лазерным приемником. Надежная фиксация сигналов и защита от помех.
Антирадары премиальной категории рассматривают не только на наличие функциональных возможностей, но и с точки зрения приборов, не имеющих права на ошибку:
- Whistler Pro-80ST RU.Современный, многофункциональный, компактный радар, отвечающий всем требованиям водителей. Надежный, с хорошей фиксацией сигналов и защитой от помех.
- Neoline X-COP S300. Антирадар многофункциональный, состоящий из 3 блоков, располагаемых под капотом и панелью приборов. Надежная фиксация всех сигналов, прекрасная защита от помех.
- Playme SILENT, который еще называют «глушилка от камер радаров», обладает высокой эффективностью работы. Надежный, с отличной защитой от помех. Настоящий антирадар оснащен OLED-дисплеем и дорогостоящий.
Качественные и долговечные радар-детекторы Fujida Neo 9000 отлично себя зарекомендовали своими функциональными возможностями. Оцените их технические данные.
Как сделать своими руками

Функция антирадара заключается в принятии сигнала радарной установки и своевременном предупреждении водителя сигналом. Такую функцию сигнализатора может выполнить любая отвертка со звуковым индикатором, предназначенная для работ со скрытой электропроводкой, которую можно найти в хозяйственном отделе любого магазина, и стоит она недорого.
Проверить такое устройство можно на ходу: если в дороге самодельный антирадар начнет издавать писк, предупреждая водителя, значит, впереди находится пост полиции с радарной установкой. Отзывы автолюбителей, проверивших это устройство в своей практике, говорят о том, что прибор работает, но порой не хватает расстояния для изменения скорости движения.
Что говорит закон
Во многих странах мира использовать даже радар-детекторы при эксплуатации транспортных средств запрещается, не говоря уже об активных радарах. Джаммеры не лицензируются как радиопередающие средства и попадают под административную статью. Штрафные санкции в отношении физических лиц, использующих активный радар, составляют от 500 до 1000 руб. с изъятием этих устройств.
На практике случаев нахождения джаммеров в автомобиле и последующего доказательства их применения пока не было, т.к. обнаружить их чрезвычайно трудно. К тому же работники ДПС с ними мало знакомы. Лазерные приборы не попадают под административную статью, т.к. не являются радиопередающими устройствами.
Наверное каждому водителю хоть раз приходила в голову мысль обзавестись антирадаром, особенно после очередного рэкета ГИБДД-шника на дороге. Так за дело! Но давайте сразу уточним: антирадар - это девайс подавляющий милицейский радар, и сборка его очень сложное занятие. Здесь мы рассмотрим более простую схему антирадара - так называемый радар - детектор, сигнализирующий о сканировании вашей машины инспектором.
Для замера скорости машины, радар ГАИ принимает излучение, отраженное от автомобиля, а радар-детектор — прямое, поэтому радар-детектор всегда способен обнаружить радар раньше по времени, чем тот замерит скорость автомобиля! Так, если гаишник сканирует из своего радара за 500 м. от автомобиля, это дальность действия устройства Визир, то до того, как автомобиль приблизится на видимое расстояние 100 м у вас есть возможность скинуть скорость.

Эта схема антирадара довольно распространена в сети, и хоть лично я её не собирал, но мне приходилось чинить такое самодельное устройство. Там СВЧ диод - детектор стоял в небольшой воронке из жести и вся конструкция вмещалась в корпус, спаяный из фольгированного текстолита, размером с пачку сигарет. При СВЧ облучении - мигало и пикало. Вот ещё один вариант схемы антирадара из журнала Радио:

Все радары, представленные на вооружении ГИБДД, работают с частотами 10525 МГц, 24150 МГц и 34700 МГц. Эти радар - детекторы способны засечь их все.
Настройку схемы антирадара можно выполнить стоя неподалёку от человека с радаром;

Или чтоб не светиться, возле стационарной радар - камеры:

Иногда их ставят за пару км перед постом ГАИ:

В последнее время, на вооружение органов взяты: Радиолокационный видеозаписывающий измеритель скорости ВИЗИР, состоит из двух независимых блоков — измерителя скорости и цифровой фотовидеокамеры. Камера включается как автоматически при превышении едущей машиной заранее выставленного лимита скорости, так и вручную — автоинспектором. Камеры наружного наблюдения со встроенным радаром. Устройство работает постоянно, а при превышении скорости включается датчик, активирующий фотокамеру.
На рынке так-же предлагают антирадары. Это устройство не является запрещенным: нигде в законе не написано, что нельзя пользоваться радар-детекторами. Вот некоторые образцы фирменных иностранных изделий:

Cobra XRS-9445 Radar Detector. Price: $109.99

Cobra XRS-R9G with GPS Speed & Red Light Camera Detector. Price: $229.98
Не знаю кто как, но я давно хотел сделать радар, такой чтоб туда-сюда излучатель крутился и на экране видно было наличие и дистанцию до объектов. Конечно в домашних условиях вещь, подобную военным или авиа службам сделать не получится - там и мощности, и размеры недосягаемые. Но что-то похожее, причём совсем не сложное и не дорогое (пару тысяч рублей) соорудить возможно. Итак, на основе популярного Ардуино вы можете сделать такую себе мини РЛС с помощью ультразвукового детектора и собственно платы Arduino. Схема подсмотрена на сайте "Мехатроник". Все, что нужно для этого проекта: ультразвуковой датчик для обнаружения объектов, маленький серводвигатель для поворота датчика и плата Arduino для управления ими. Ну и макетка с проводами.

Сначала сделаем крепление для подключения ультразвукового датчика к серводвигателю. Изготавливаем его, как это показано на рисунке ниже, потом он приклеивается и крепится к двигателю с помощью винта.

Теперь прикрепите штырьки, на которые припаяем 4 провода для подключения датчика.

Прикрепите мотор сервопривода к плате Arduino, используя обычную резинку для волос.

Мы подключили ультразвуковой датчик HC-sr04 к выводам 10 и 11, а серводвигатель к 12 контакту на плате Arduino.
Исходный код
Теперь нужно взять код и загрузить его на плату Ардуино, которая позволит взаимодействовать между Arduino и обработкой сигнала. Здесь будем получать значения для угла и расстояние, измеренное с помощью датчика с платы Arduino на обработку IDE с помощью функции SerialEvent(), которая считывает данные из последовательного порта, и будем ставить значения угла и расстояния в переменные iAngle и iDistance. Эти переменные будут использоваться для построения линии обнаружения объектов.
void drawRadar() <
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,1800,1800,PI,TWO_PI);
arc(0,0,1400,1400,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,600,600,PI,TWO_PI);
// draws the angle lines
line(-960,0,960,0);
line(0,0,-960*cos(radians(30)),-960*sin(radians(30)));
line(0,0,-960*cos(radians(60)),-960*sin(radians(60)));
line(0,0,-960*cos(radians(90)),-960*sin(radians(90)));
line(0,0,-960*cos(radians(120)),-960*sin(radians(120)));
line(0,0,-960*cos(radians(150)),-960*sin(radians(150)));
line(-960*cos(radians(30)),0,960,0);
popMatrix();
>
Для рисования линии, которая движется вдоль радара, сделана функция drawLine(). Переменная iAngle используется как линия, что перерисовывается для каждой ступени.
void drawLine() <
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(960,1000); // moves the starting coordinats to new location
line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
>
Для прорисовывания обнаруженных объектов служит функция drawObject(). Она получает расстояние от ультразвукового датчика, преобразует его в пикселах, и в сочетании с углом датчика рисует объект на радаре - экране ЖК монитора.
void drawObject() <
pushMatrix();
translate(960,1000); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*22.5; // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40) <
// draws the object according to the angle and the distance
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
>
popMatrix();
>
Текст на экране - функция drawtext(), которая рисует полосы на конкретных местах.

Все эти функции вызываются в основном функцией Draw (), которая повторяется все время и рисует на экране картинку окружающего пространства. Также здесь используется имитации размытия движения и медленное затухание движущейся линии.
fill(98,245,31);
textFont(orcFont);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, 1010);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
>
Вот окончательный внешний вид радара. Как видите, ничего сложного нет. И хоть мощность и дальность небольшие, но тут главное понять сам принцип и заставить хотя бы это заработать. А дальше, при желании, можно экспериментировать над увеличением дальности и чёткости засекания предметов.
Видео
А по этой ссылке скачайте полный исходный код обработки радиолокационной станции на Ардуино.

Умный аварийный резервный светодиодный источник света - простая схема автоматически включающейся LED подсветки.

Усилитель мощности звука на транзисторах, из радиоконструктора DJ200. Проверка работы схемы.

Теория работы импульсных источников питания и варианты схемотехники.
Уж столько за пару лет нафлудили в радарных темах, что явно пришло время рассказать, как на самом деле можно глушить доплеровский радар-фен.
.
Всем известно, что в доплеровских фенах частота может гулять в пределах сотен мГц.
Самим радарам это по-барабану, так как их генератор в передатчике одновременно используется гетеродином в приемнике.
Общим для всех типов доплеровских радаров является выделение в смесителях на входе разницы между переданной и принятой частотами. Той самой частоты Доплера.
В наиболее простых моделях радаров на входе стоят обычные диодные смесители, выделяющие разностную частоту.
В более продвинутых моделях используются балансные смесители, обеспечивающие лучшую развязку - лучшее подавление на выходе входных сигналов радиочастоты.
Если первый тип смесителей допускает прямое детектирование мощных сигналов всех частот попавших на вход, то второй тип смесителя позволяет отсечь все сигналы, отличающиеся по частоте от излученной передатчиком частоты более полосы используемых ФНЧ, - не более десятков кГц.
Радары с такими смесителями не боятся помех, смещенных от их частоты более этих значений. Эти помехи просто не попадают в тракт ПЧ.
Для глушения таких радаров помеховый сигнал должен точно попадать в тракт ПЧ.
Можно пытаться подстраиваться под частоту радара частотой помехи, но это сопряжено с определенными трудностями, и в первую очередь с требуемым малым временем на такую подстройку. Менее длительности одиночного замера скорости радаром порядка сотни мс.
Это если решать задачу "в лоб".
.
Но есть еще обходной способ.
Вначале уточним, какие частоты образуются в смесителе супергетеродинного приемника.
Пусть частота гетеродина приемника радара будет Fг, а частота отраженного сигнала Fо.
В смесителе будут выделяться НЧ биения с разностной частотой Fг - Fо.
ВЧ биения Fг + Fо отсекутся, и их можно не рассматривать.
Кроме того в смеситель будут попадать и частоты от других источников в пределах полосы пропускания входного волноводного тракта.
Так как волноводно-рупорный тракт радара достаточно широкополосен даже в высокодобротном исполнении, и не имеет узкополосной фильтрации, в смеситель будут попадать частоты в полосе сотен мГц. В интервале не менее 24,150+/-100мГц.
Но если эти частоты будут отстоять от несущей радара более полосы ПЧ (десятки кГц), то они не повлияют на работоспособность радара. Но только при условии, что их уровень не будет слишком большим - больше затухания пролаза радиочастоты на выход балансного смесителя.
В реальных условиях такое возможно лишь в непосредственной близости радара к источнику излучения. В пределах десятков метров.
.
Теперь рассмотрим случай, когда одновременно излучаются две частоты помехи со смещением в единицы кГц в полосе 24,150+/-100мГц. Обозначим эти частоты F1 и F2.
Взаимодействуя с частотой гетеродина Fг, они вместе с отраженным сигналом датут в смесителе следующий набор биений:
Fг - F1, Fг - F2, Fг - Fо. Эти частоты также будут взаимодействовать между собой.
Разность частот (Fг - F1) и (Fг - F2) составит несколько кГц. Ровно столько, насколько будут смещены пара частот от передатчиков помех.
Эта разность вместе с истинной частотой доплера (Fг - Fо) без проблем попадет в тракт ПЧ приемника через любой тип смесителя, включая двойной балансный смеситель на самых крутых моделях радаров.
.
Как практически сделать пару генераторов на 24гГц с нужной разницей частот в единицы кГц.
Достаточно сделать два идентичных генератора на Ганна, один из которых имеет возможность подстройки по частоте в небольших пределах.
На простом смесительном диоде выделяется разность их частот, и по этому сигналу идет перестройка одного из генераторов изменением напряжения питания диода Ганна.
Выбранная разность частот пары генераторов будет давать в радаре требуемую частоту псевдо Доплера.
.
На вопросы, какая получается дальность глушения, и на каких радарах пробовалось - пожалуйста, хоть раз попробуйте сами.
Это сообщение отредактировал ded - Jan 21 2012, 12:26 AM
Продукция фирмы Hittite очень нравится, она вне конкуренциии.
Не нравится ее цена и сложность доставания.
.
Еще важный нюанс.
Постоянно удерживать разность частот двух генераторов на 24гГц с точностью единиц кГц нет надобности, да и сложновато для простого устройства.
Для рассматриваемой задачи нарушения работы радара без навязывания ему своего значения псевдо Доплера вполне достаточно нарушить повторяемость результатов в серии замеров скорости. При этом он будет постоянно глючить и уходить на повторные замеры.
Достаточно постоянно реверсировать частоту перестраиваемого генератора относительно частоты второго генератора с циклом, определяемым петлей испульзуемой схемы АПЧ, и в полосе возможных частот Доплера около пары десятков кГц.
Это сообщение отредактировал ded - Jan 21 2012, 10:53 AM
Вот так выглядит примерный рабочий вариант схемы.
Вряд ли кто будет это повторять, скорее в познавательном плане поясню.
Собираются два идентичных по конструктиву генератора на диодах Ганна на частоту 24150мГц. Желательно выставить ее поточнее. Вполне достаточно при помощи "Белтроникса" с частотомером. Он дает точность +/-1мГц.
Требования к волноводам минимальны. Они гнутся на стальной оправке из листовой латуни, и запаиваются снаружи по швам.
Режимы работы и температурный дрейф генераторов будут достаточно близки друг другу. Тем не менее их частоты неизбежно со временем начнут плыть. Как показывает практика, в низкодобротном самодельном волноводе это может составлять величину до двух-трех десятков мГц в интервале рабочих температур от - 10 до + 80гр.
Изменение частоты у обоих генераторов от температуры будет идти в одну сторону.
Температурный относительный дрейф обоих генераторов между собой не превысит 20-30мГц.
Частота биений их частот выделяется на смесительном СВЧ диоде в отдельном волноводе, расположенным между двумя генераторами.
По биениям разностной частоты осуществляется взаимная подстройка генераторов.
На ПИКе собран простейший частотомер до 40-50мГц, который сравнивает между собой результаты очередных замеров частоты биений, и изменяет частоту перестраиваемого генератора в сторону уменьшения этой частоты.
Сравнения частот идет без определения абсолютных величин, только по принципу - больше/меньше между соседними замерами. Этого вполне достаточно для привязки генераторов между собой с минимальной разницей частот.
Замеры идут постоянно с циклом около 10мс. С такой же периодичностью, соответственно происходит корректировка частоты перестраиваемого генератора.
До тех пор, пока частоты генераторов не сравняются.
После этого частота перестраиваемого генератора начинает реверсивно перестраиваться относительно второго генератора с отклонением в пределах +/- десятков кГц.
Этот разброс определяется точностью счета используемого частотомера, и инерционностью используемой цепи перестройки частоты генератора.
Такое время выбрано исходя из длительности циклов замеров в существующих импульсных доплеровских радаров, так, чтобы за время одного цикла неоднократно происходило искажение результатов в серии замеров радара.
Примерно, как-то так.
Если найдутся желающие попробывать сами, буду подробнее детализировать нюансы.

Присоединённое изображение (Нажмите для увеличения)
netdemon, я эту схему только планирую к реализации.
По частям все собирал, работает, но с частотомером еще не пробывал.
ПИК в частотомере должен работать до частот 30мГц максимум, больше частоты у генераторов не расползутся. Это уж я с запасом говорил.
Эдди говорил, что реально ПИК тянет гораздо выше, проблем не будет и без прескаллера.
Из стеклотекстолита я делал волновод. Диод Ганна прекрасно генерил, но был слабый теплоотвод.
У диода мизерный КПД. При токе в 1,5А и 6В он отдает всего мощность в 300мВт.
Остальное идет в тепло, и его надо отводить от диода. Иначе ему кирдык.
Две вещи боится диод: перегрев и перенапряг (статику и броски напряжения).
Я во всех схемах ставлю теперь супрессор в параллель.
При амплитудной манипуляции питания диода без супрессора, он вылектает максимум через минуту от бросков напруги на фронтах.
Если диод сразу поставлен в правильный режим, то может работать годами.
Но если постоянно работает близко к 80 градусам, то идет быстрая деградация доменной зоны, старение. Максимум год интенсивной работы вытянет.
| QUOTE (ded @ Jan 23 2012, 05:15 PM) |
| ПИК в частотомере должен работать до частот 30мГц максимум, больше частоты у генераторов не расползутся. Это уж я с запасом говорил. Эдди говорил, что реально ПИК тянет гораздо выше, проблем не будет и без прескаллера. |
"Совершенство достигается не тогда, когда нечего добавить, а тогда, когда нечего убрать"
/Антуан де Сент-Экзюпери/
Для повторения и отладки девайса не требуется дорогих приборов, и анализаторов спектра.
Если тема действительно интересна, и есть машина прикупите радар-детектор "Белтроникс 65" с режимом частотомера (см. фото).
Где купить диоды Ганна я выкладывал телефоны фирмы в Москве. От 150 до 450рублей.
У этой фирмы выход на неликвиды оборонки.
Повторять больше не буду - ищите в темах, а то действительно кто-нить увидит в этом мою корысть.
По какой схеме все собирать тоже выложил.
Никаких дефицитных материалов, или заказных конструктивов не потребуется. Все можно сделать за пару вечеров на коленках.
Никаких тайн, только засучивайте рукава, и подключайтесь к экспериментам.
Это сообщение отредактировал ded - Jan 24 2012, 12:21 PM

Присоединённое изображение (Нажмите для увеличения)
К сожалению, в законченном виде прибора нет. Все отработано только фрагментарно.
В первую очередь сам генератор на диоде Ганна.
Вот примерный конструктив резонатора.
Латунь гнется на стальной оправке 11х5,5мм.
Рупор можно не делать вообще. Без него все будет работать. Просто диаграмма направленности будет около 60гр.
Генератор по сути является с открытой резонансной системой. Поэтому его частота сильно зависит от отражения перед рупором. Это надо учитывать при эксплуатации.
Без каких-либо изменений эту схему можно использовать как автодин, как датчик движения.

Присоединённое изображение (Нажмите для увеличения)
netdemon, я уже писал, что не занимаюсь распространением ни глушилок, ни комплектующих для них, а также посредничеством с торгующими организациями.
Касаемо волновода из стеклотекстолита.
Выполненный по рекомендованным размерам он однозначно запустит диод в генерацию.
Такой волновод прекрасно бы подошел для маломощных диодов в единицы мВт.
Но почти 10Вт тепла он не сможет эффективно отводить от диода площадью в единицы квадратных мм через текстолит, как его ни обдувай, и ни вешай радиаторы. Должен быть очень хороший тепловой контакт, и массивный канал отвода тепла.
За 30 секунд он успеет перегреться. Если и не выйдет сразу из строя, то начнет быстро деградировать его внутренняя полупроводниковая зона.
И еще некоторые вопросы, на которые приходится отвечать по почте одновременно в несколько адресов.
Например, нужен ли рупор?
Без рупора можно обойтись на стадии экспериментов. В боевом устройстве он понадобится по нескольким причинам:
1. Лучшая развязка и согласования выхода генератора;
2. Лучший теплоотвод при большей общей площади волновода;
3. Лучшая диаграмма направленности;
4. Меньшее взаимное попадание мощности от соседнего генератора.
На последнем пункте имеет смысл остановиться подробнее.
Так как волновод выполняется не по идеальной технологии и имеет небольшую добротность, то частота генерации диода подвержена существенной зависимости от внешних факторов. В том числе от внешнего близкого по частоте сигнала.
Это, как влияние кварца в низкодобротной схеме - происходит утяжка и привязка генерируемой частоты. При слишком сильном внешнем сигнале в какие-то моменты будет происходить "залипание" частот двух генераторов.
Оба генератора должны быть достаточно разнесены друг от друга хотя бы в пределах самого девайса.
Между ними в отдельном коротком отрезке волновода устанавливается смесительный СВЧ диод.
Снимаемые с него биения от 0 до
30мГц усиливаются быстродействующим операционником до уровня достаточного для раскачки входа частотомера.
Размеры рупоров не критичны. Чем больше выходной раскрыв рупора, тем Уже диаграмма направленности, то есть, тем меньше телесный угол, в котором сосредотачивается излучаемая диодом энергия.
Можно взять соотношение площади раскрыва рупора к сечению волновода равным 2. 3.
Это даст сужение диаграммы открытого волновода (
60гр) до 20. 30гр.
Это сообщение отредактировал ded - Jan 24 2012, 09:16 AM
Набросал примерный алгоритм работы.
При включении питания контроллер начинает формировать на выходе управления генератором 10ти разрядный ШИМ сигнал от 0 до 5В одиночными степами по 1мс. По данному сигналу перестраиваемый генератор может изменять свою частоту в пределах примерно +/-20. 30мГц от центральной настройки.
Одновременно включается режим частотомера с тем же временным циклом счета около 1мс.
Начинается первичная привязка частот генераторов между собой.
Привязка проводится по минимуму частоты биений на входе частотомера.
При этом перестраиваемый генератор проходит весь диапазон возможных перестроек от минимального до максимального значения частоты в реверсивном режиме, пока не произойдет устойчивый захват частоты биений.
Результат каждого цикла счета частотомера запоминается в условных значениях (без определения абсолютного значения частоты), и сравнивается с результатом следующего цикла.
Если величина текущих замеров частоты биений уменьшается, то подстройка генератора продолжается в ту же сторону со скоростью - один степ ШИМ сигнала на один замер (1 младший разряд / 1мс).
Но как только результаты замеров начинают расти, то управляющий ШИМ сигнал постепово реверсирует в противоположную сторону. Включается режим «качелей» относительно минимумов показаний частотомера.
В идеале такая автоподстройка может идти с минимальной амплитудой +/-1 степ ШИМ перестройки частоты генератора. Реально качели будут с немного большим размахом.
При разбивки всей полосы перестройки генератора (
50мГц) на 1012 степов один степ будет соответствовать перестройке частоты порядка 50кГц.
То есть, реально пара генераторов будут реверсировать по частоте относительно друг-друга в полосе не более 100. 200кГц.
В случаей потери сигнала биений пары генераторов из-за скачка или сбоя одного из них, из-за выпадения из полосы захвата частотомера 30мГц , из-за наведенной мощной помехи и пр., программа переводит работу устройства в режим начальной привязки генераторов по частоте.
Включается циклический режим реверсивного изменения частоты перестраиваемого генератора во всем диапазоне перестроек, пока не произойдет устойчивый захват частоты биений.
Устойчивым считается захват частоты, при котором каждый последующий замер частоты не отличается от предыдущего более заранее выбранного доверительного интервала.
При выбранных параметрах управляющего ШИМ сигнала полная перестройка генератора по всему диапазону занимает не более 1 секунды. В этих же пределах обеспечивается привязка частот обоих генераторов.
При реверсивной привязке частот генераторов в приемнике радара постоянно присутствуют свипирующие гармоники от 0 до сотни кГц, с частотой свипирования около 1кГц. Как поведет себя радар, и что будет показывать предположить сложно. Видимо, разные модели по-разному. Скорее всего будет показывать присутствие помехи, сбой показаний, или отсутствие отраженного сигнала. Ведь уровень свипирующих гармоник будет существенно превышать полезный сигнал.
Идея создания некоего подобия радара для определения расстояния пришла одному из моих студентов. Мы продолжили ее разработку и решили ввести в программу курса в качестве одного из проектов.

После пары недель подготовки мы, наконец, определились, как его начинать и что для этого может понадобиться. Проект не должен был быть очень продвинутым; мы установили средний уровень сложности. Ниже представлен пример использования персонального радара узкого диапазона. Он и должен был выглядеть немного смешно, так что можете смеяться!
Описание и цель проекта
Целью проекта было создание функционирующего радара. От системы требуется лишь измерять расстояние под углом в 90 градусов, как показано в примере выше. В зависимости от выбранного сенсора, система функционирует в пределах 4-30 см, 20-150 см и 1-5,5 м.

Результаты проекта повлияют на последующие разработки, в которых мы попытаемся интегрировать радар для навигации мобильных роботов в естественных условиях.
Электронные детали
- Стабилизатор напряжения LM7805 5 В
- Микроконтроллер PIC18F452
- ИК Сенсор GP2D120
- Кварцевый резонатор на 4 или 8 MHz
- Переключатель
- Конденсатор
- 30-тиконтактный разъем
- 5 триггеров 74LS373
- Макетная плата
- Припой
- 36 индикаторов
- Провод 30 AWG
- Инструменты для работы с проводами
- Паяльник
Подробный список запчастей
Вы можете знать, а можете и не знать всего относительно вышеперечисленных деталей, поэтому, чтобы помочь разобраться в них, было включено изображение каждой детали. Появились три новых объекта, не указанных до этого в проекте: сервосистема, 74HCT373 и ИК сенсоры. Скоро появится описание и ИК датчиков; что касается 74HCT373 -- ниже будет пред ставлен краткий обзор. Вы всегда можете свериться с спецификацией микросхем, просто задав поиск по запросу «74HCT373».
74HCT373
74HCT373
Восьмиразрядная микросхема, содержащая в себе трехстабильный триггер. Проще говоря, данный чип способен хранить 8 бит цифровой логики и удерживать в памяти до стирания или изменения ее посредством LE-Latch Enable вывода.
Принципы работы
- Управляющие выводы LE и OE
- 8 Ввод данных D0-D7
- 8 Вывод данных D0-D7
Питание (Vcc & GND.)
Активация вывода (ОЕ) позволяет Q0-Q7 выводить данные на данный момент находящиеся в D-триггерах.
Активация триггера (LE) позволяет перезапись данных, содержащихся на D0-D7, в D- триггер.
Обзор схемы
Схема для данного проекта намного сложнее предыдущих. В нашей разработке есть 4 основных преимущества.
- Мы сможем программировать изображения с разрабатываемой платы.
- Мы будем контролировать сервосистему.
- Мы будем снимать данные с ИК сенсора расстояния.
- Мы установим 36 LEВ индикаторов для отображения вывода данных, полученных с ИК сенсора.
Характеристики схемы
- Питание осуществляется через аккумулятор на 9В, подключенный к LM7805 с конденсатором 1uF, подключенным к выводу/заземлению для обеспечения бесперебойного постоянного тока LM7805.
- Программный цикл
- Программирование осуществляется посредством подсоединения двух разъемов от контроллера к программатору, предоставляя первому разъему программатора доступ к MCLR*/Vpp-Pin1 на контроллере. В целях безопасности установлен выпрямительный диод.
- ИК Сенсор Расстояния
- ИК Сенсор использует один разъем контроллера PIN 2 - RA0. Используются аналоговые возможности этого вывода для получения значения АЦП, так как с ИК сенсора снимается только аналоговый сигнал. Данное значение сообщает, есть ли что-то в радиусе охвата сенсора.
LED индикация
В общей сложности еcть 40 LED индикаторов. Каждый чип 74HCT373 контролирует до 8 индикаторов; так как 40/8=5, нам нужно 5 схем 74HCT373, чтобы управлять всеми 40 индикаторами. Необходимо отметить на схеме, что для всех 5 чипов используется одна шина данных.
Данная разработка использует три основных прибора для создания персонального радара. ИК сенсор подключается к микроконтроллеру, и затем выводится на сегмент индикаторов. Предоставляется наглядная демонстрация этого процесса:
Использование разных сенсоров
Важным аспектом в точности ИК сенсоров, используемым в данном проекте является то, что они имеют одинаковые характеристики напряжения, поэтому данная программа совместима со всеми индикаторами. Единственное, что необходимо знать, -- как используется сенсор для определения расстояния, выводимого на индикаторах.
Использование
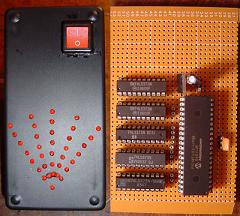
Итак, взглянем на окончательный вид прибора:

Таков внешний вид собранного прибора. Перейдем к следующему разделу и продолжим сборку прибора.
Дизайн прибора
Пластиковый корпус внизу на картинке не упоминался в списке запчастей. Это обычный корпус, который можно приобрести у любого производителя или продавца электроники. В первую очередь необходимо просверлить 36 отверстий для индикаторов в схеме и закрепить в них индикаторы. Перед вставкой индикаторов в отверстия было использовано закрепляющее вещество.

После того, как панель спаяна, начинаем подключение схемы. Каждый проводок нужно подключить сквозь маленькое отверстие корпуса.
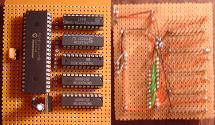
Рисунок выше отображает вид панели на ранней стадии. В начале подключения проводов наблюдается скопление огромного их количества, например, вот так:
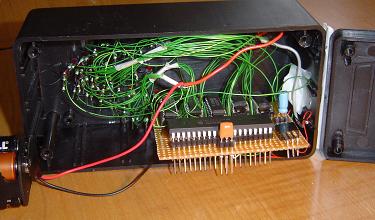
Последним штрихом в разработке персонального радара является возможность его использования он-лайн. Используются провода длиной 2-4-метра при подключении сервосистему и ИК сенсор. Проделываем отверстие спереди корпуса для данных проводов:

Последним штрихом в разработке персонального радара является возможность его использования он-лайн. Используются провода длиной 2-4-метра при подключении сервосистему и ИК сенсор. Проделываем отверстие спереди корпуса для данных проводов:
Покончив со сборкой перейдем к программной части разработок. Это, безусловано, более тонкая часть разработки, чем даже прокладывание проводов.
Программное обеспечение для данного прибора включает три основных части:
- Управление Сервосистемой
- Управление LED-индикацией
- ввод A/D/
Поскольку все программное обеспечение данного проекта не поместится на одной странице, будет объяснено, что это за части и как они работают.
Управление Сервосистемой
Управление сервосистемой осуществляется таймерами и прерываниями. Двумя отдельными прерываниями, срабатывающими одновременно для создания желаемого звука, генерируется сигнал в 50 Ггц, и указатель сервосистемы двигается маленькими шагами регулируя скрипящий звук.
Регулирование LED индикации.
Индикаторы регулируются триггерами 74LS373/74HCT373. Система постоянно обновляет данные триггера, выводимые на индикаторы.
А/Ц Ввод
ИК сенсор осуществляет аналоговый вывод. Используется конвертор для определения значения напряжения, сообщающий, что объект вышел на расстояние вне зоны действия ИК сенсора.
Завершена сборка и настройка прибора - нужно протестировать его. В заисимости от используемого вами сенсора, индикация будет разная. Сенсоры на выбор GP2D120, GP2Y0A21YK и GP2Y0A700K0F.
Данные и наблюдения
Первым тестом радара будет тест на близком расстоянии. В качестве препятствий были использованы консервные банки.
На втором видео (на первой страничке) тестируются индикаторы 20 см - 150 см и 1 м - 5.5 м, позволяющие преодолевать более серьезные препятствия. Посмотрите, чтобы понять, о чем идет речь.
Два видеоролика продемонстрируют работу сенсора, однако при самостоятельной сборке возможны небольшие затруднения, которые будут описаны в заключении.
Обзор персонального радара
Сборка и настройка данного прибора занимает немного времени. Это проект, который вы сможете за день, и он уже имеет нишу в применении, но с течением времени будут возникать дополнительные трудности. ИК сенсоры могут становиться ненадежными, результаты вывода могут быть малыми из-за влияния среды и окружения.
Действия, которые нужно предпринять
Для увеличения радиуса охвата сенсора планируется использование ультразвуковых датчиков, эквивалентных описанным выше «звуковым сенсорам», передавая данные о расстоянии от вас до объекта. Диапазон ультразвука шире чем у инфракрасного излучения, и он более надежен в неблагоприятных условиях.
Заключение
Проект был увлекательным изучением сенсоров ИК излучения. Он демонстрирует, что результаты могут быть получены и использованы реально. Многие дальнейшие проекты могут быть разработаны на базе этого.
Читайте также: